1 | # ================================================================================= |
在此之前,第一部分我们完成了基础的环境配置,bochs配置,以及MBR,loader的的基础编写,成功的进入了保护模式并且开启了内存分页功能
第二部分完成了对内联汇编,中断初始化,定时器初始化,也实现了基础打印函数*
第三部分完成了对内存管理,线程,同步,也实现了基础生产者与消费者*
这一部分主要学习用户进程/完善内核(系统调用,完善内存)/硬盘驱动相关内容
ps:如果参考本系列文章来实操,需要结合《操作系统真象还原》一起观看,否则会缺失很多细节
B 用户进程
这里概念就不多说了(大家可以自己查询TSS–任务状态段),真象还原是仿照Linux的任务切换方法,其中我们也会使用到TSS,但是只是希望为0特权级的任务提供栈
Linux 为每个 CPU 创建一个 TSS,在各个 CPU 上的所有任务共享同一个 TSS,各 CPU 的 TR 寄存器保存各 CPU 上的 TSS,在用 ltr 指令加载 TSS 后,该 TR 寄存器永远指向同一个 TSS,之后再也不会重新加载 TSS。在进程切换时,只需要把 TSS 中的 SS0 及 esp0 更新为新任务的内核栈的段地址及栈指针
Linux 中任务切换不使用 call 和 jmp 指令,这也避免了任务切换的低效
这里我们直接开始写代码吧
B.1 定义并初始化TSS
首先是在global.h中添加等会需要用到的属性
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/global.h |
然后创建一个目录userprog,以后用来存放有关用户进程的文件,同理,添加一个Makefile,修改后和添加的文件放在下面了
下面主要是对tss的初始化
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/tss.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/tss.h |
下面是对Makefile的修改,主要还是添加文件依赖,以及头文件包含等,同时修改了之前有个位置写错了(有关用户库和内核库的文件编译重复了)
1 | # ================================================================================= |
1 | #userprog/Makefile |
注意,要在init.c文件中添加函数tss_init()
这些准备工作更加偏向概念,这里就不多说了,大家可以仔细阅读一下原书内容,下面才正式开始实现用户进程
B.2 实现用户进程(1)
首先在要在进程的基础上来实现进程,我们先来大致了解一下原理,做点准备:
进程与内核线程最大的区别是进程有单独的 4GB 空间,这里指的是虚拟地址,每个进程都拥有 4GB 的虚拟地址空间,虚拟地址连续而物理地址可以不连续,这就是保护模式下分页机制的优势
为演示此特性,我们需要单独为每个进程维护一个虚拟地址池,用此地址池来记录该进程的虚拟中,哪些已被分配,哪些可以分配。与各个进程相关的数据,如果数据量不大的话,最好是存储在该进程的 PCB 中,这样便于管理。在上一节中已经知道,进程是基于线程实现的,因此它和线程一样使用相同的 pcb 结构,即 struct task_struct,我们要做的就是在此结构中增加一个成员,用它来跟踪用户空间虚拟地址的分配情况
下面就来修改thread.h文件,这里给出修改的部分:
1 | //略..... |
然后再memory.c中添加相关的功能,在内存池struct pool中添加一个锁用来在申请内存的时候作为互斥使用,后面添加了在用户内存池分配内存的函数等,以及让物理地址和虚拟地址建立映射,最后再添加一个通过虚拟地址返回物理地址的函数,记得还要在初始化函数中添加锁的初始化,这里还是给出片段,总体的代码我应该会添加到本节的最后:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/memory.c |
咳咳,后面还要继续修改memory.c函数…….
B.3 实现用户进程(2)
因为是用户进程,所以我肯定要进入特权级3,现在又该如何从搞特权级转入低优先级嘞
,一般情况下,CPU 不允许从高特权级转向低特权级,除非是从中断和调用门返回的情况下。咱们系统中不打算使用调用门,因此,咱们进入特权级 3 只能借助从中断返回的方式,但用户进程还没有运行,何谈被中断?更谈不上从中断返回了……但是 CPU 比较呆头呆脑,我们可以骗过 CPU,在用户进程运行之前,使其以为我们在中断处理环境中,这样便“假装”从中断返回
如何假装:首先得在特权级 0 的环境中,其次是执行 iretd 指令
iretd 指令会用到栈中的数据作为返回地址,还会加载栈中 eflags的值到 eflags 寄存器,如果栈中 cs.rpl 若为更低的特权级,处理器的特权级检查通过后,会将栈中 cs 载入到 CS 寄存器,栈中 ss 载入 SS 寄存器,随后处理器进入低特权级,所以在栈中提前准备好数据即可
但是既然涉及到栈的操作了,那不如将进程的上下文也存到栈中,然后通过一系列的pop操作将用户进程的数据装载到寄存器,然后通过iretd指令退出中断,我们在退出中断的函数intr_exit中修改(kernel.S)
- 即便是假装,退出中断也要经过intr_exit
- 需要提前准备好栈,在里面装填用户进程的上下文,借用pop出栈的机会将上下文载入CPU寄存器
- 要在栈中存储CS选择子,将RPL修改为3(用户特权级)
- 栈中段寄存器的选择子必须指向 DPL 为 3 的内存段 用户进程只能访问DPL为3的内存段
- 必须使栈中 eflags 的 IF 位为 1 响应新的中断
- 必须使栈中 eflags 的 IOPL 位为 0 IO操作
下面来开始继续写代码,首先是global添加的定义
1 | //-------------- IDT描述符属性 ------------ |
现在还是在userprog目录下创建process.c/h来实现用户进程
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/process.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/process.h |
同理要在调度器中更新对进程的处理:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/thread/thread.c |
B.4 测试用户进程
还是直接在main函数中测试,因为还没有实现根文件系统等,所以这里还是通过在主函数 添加函数来模拟用户级的进程(线程):
同时,因为用户级特权不能直接使用打印的函数,所以这里我们只修改变量,然后让内核线程来打印
1 | /***** /home/mouse/OS_mouse/tool/bochs/mouse/kernel/main.c *****/ |
在调试之前,补充一个问题,就是之前在loader.S文件,当我们进入保护模式创建页表之后,我通过info gdt会发现基地址并不是预期的0x900,而是0x903,原因已经补充到了当时出现问题的地方
如果loader.S开头运用了jmp loader_start这一命令,gdt表的基地址就会发生偏移,因为跳转指令本身可能占有3字节,可能会往后偏移,导致后面的tss添加的时候不能以0x900作为gdt基地址
所以之前在初始化tss的时候,地址发生了错误,这样编译运行便会发生报错
这里有两个修改方案,第一个就是不使用jmp loader_start指令,让基地址为正常值,同时修改mbr文件中跳转的命令,让其可以正常跳转到loader_start的位置,第二个就是修改初始化tss的时候使用的基地址(先通过info gdt得到真正的基地址,但是这样肯定不推荐的)
其中跳转+0x300,是通过计算得出的,最开始是填充偏移到0x200,然后又添加了256字节的数据区,累计起来就0x300
下面给出第一种方案的修改部分,注意修改之后还要重新编译写入磁盘
1 | ; /home/mouse/OS_mouse/tool/bochs/mouse/loader.S |
1 | ; /home/mouse/OS_mouse/tool/bochs/mouse/mbr.S |
然后编译写入运行,就可以得到书中的效果,即数字一直增大,下面我们来验证是否真的是用户特权级3
首先通过指令获取地址
1 | nm build/kernel/kernel.bin |grep -P 'u_prog|test_var' |
mouse@ubuntu:~/OS_mouse/tool/bochs/mouse$ nm build/kernel/kernel.bin |grep -P 'u_prog|test_var'c0007300 B test_var_ac0007304 B test_var_bc00015e7 T u_prog_ac00015f9 T u_prog_b
得到变量的地址后,我们设置变量u_prog_a的断点,然后查看cs寄存器的值
1 | lb 0xc00015e7 #设置断点 |
1 | <bochs:1> lb 0xc00015e7 |
我们通过调试来设置断点,查看cs寄存器的值,此时 cs 的值为 0x002b,我们关注最低 4 位,其值为 b,换为二进制是 1011,最低 2 位为 rpl,也就是 3,所以可以判断此时用户进程确实是在 3 特权级下,与预期符合
ok呀,终于结束了,代码一多好难找调试找错误啊…….
C 完善内核(系统调用,完善内存)
之前我们用过系统调用,现在我们要自己来实现了
C.1 系统调用简介
系统调用就是让用户进程申请操作系统的帮助,让操作系统帮其完成某项工作,也就是相当于用户进程调用了操作系统的功能,我们还是参照 Linux 系统调用的原理,模仿着它咱们实现一份简易的系统调用版本
下面还是引用部分书中的句子
Linux 系统调用是用中断门来实现的,通过软中断指令 int 来主动发起中断信号。由于要支持的系统功能很多,总不能一个系统功能调用就占用一个中断向量,真要是这样的话整个中断描述符表都不够用呢。Linux 只占用一个中断向量号,即 0x80,处理器执行指令 int 0x80 时便触发了系统调用。为了让用户程序可以通过这一个中断门调用多种系统功能,在系统调用前,Linux 在寄存器 eax 中写入子功能号,例如系统调用 open 和 close 都是不同的子功能号,当用户程序通过int 0x80 进行系统调用时,对应的中断处理例程会根据eax 的值来判断用户进程申请哪种系统调用
Linux中使用的是系统调用 syscall,原型是 int syscall(int number, …),其中的number 是 int 型,这是系统调用号,也就是前面所说的子功能号。不同的子功能需要的参数也是不同的,所以number 后面的“…”表示此函数支持变参,函数 syscall支持不同参数个数的系统调用,在新版本 Linux 中,所有的系统调用功能都可通过这一个函数完成。顺便说一句,函数 syscall 并不是由操作系统提供的,它是由 C 运行库 glibc(GNU 发布的 libc 库版本)提供的,因此 syscall实际上是库函数
书中给出了具体的例子,来讲解这个函数,库函数的syscall是简介使用系统调用的方式,那么肯定有直接使用的方式,也就是操作系统提供的_syscall,但是它已经被linux废弃了(注意,只是废弃了_syscall 这
个符号),因为此方式最多支持6个参数,但是它的实现方式和思路非常简单,我们的简易操作系统就是使用的它
下面咱们拿_syscall3举例,当然还有其他的类型(_syscall是系统调用”族,原型是_syscallX(type,name,type1,arg1,type2,arg2,…)
1 |
这里给大伙说明下,Linux 中的系统调用是用寄存器来传递参数的,这些参数需要按照从左到右的顺序依次存入到不同的通用寄存器(除 esp)中。其中,寄存器 eax 用来保存子功能号,ebx 保存第 1 个参数,ecx 保存第 2 个参数,edx 保存第 3 个参数,esi 保存第 4 个参数,edi 保存第 5 个参数。传递参数还可以用栈(内存);
不知道您想过没有,为什么 Linux 用寄存器来传递参数,而不用栈?用寄存器快?肯定是这样的,没有哪个操作系统愿意更慢。不过这个“快”可不是出于存储介质方面的考虑,而是用寄存器传参的步骤少一些,听我慢慢道来。用户进程执行 int 0x80 时还处于用户态,编译器根据 c 调用约定,系统调用所用的参数会被压到用户栈中,这是 3 特权级栈。当 int 0x80 执行后,任务陷入内核态,此时进入了 0 特权级,因此需要用到 0 特权级栈,但系统调用的参数还在 3 特权级的栈中,为了获取用户栈地址,还得在 0 特权级栈中获取处理器自动压入的用户栈的 SS 和 esp 寄存器的值,然后再次从用户栈中获取参数。您看,光传递参数就涉及到了多次内存访问的情况,内存比寄存器要慢,而且步骤很麻烦
宏_syscall 和库函数 syscall 相比,syscall 实现更灵活,对用户来说任何参数个数的系统调用都统一用一种形式,用户只要记住 syscall 就可以了,而宏_syscall 的实现比较死板,针对每种参数个数的系统调用都要有单独的形式,因此支持的参数数量必然有限,而且用户要记住 7 种形式_syscall[0-6],调用时除了输入实参外,还要输入实参的类型,确实有些麻烦,此外这个宏会引发安全漏洞(有兴趣可自行检索相关资料),故必然会被 syscall 取代。
C.2 系统调用的实现
这里仿照 宏_stscall来实现,下面是大体步骤:
(1)用中断门实现系统调用,效仿 Linux 用 0x80 号中断作为系统调用的入口。
(2)在 IDT 中安装 0x80 号中断对应的描述符,在该描述符中注册系统调用对应的中断处理例程。
(3)建立系统调用子功能表 syscall_table,利用 eax 寄存器中的子功能号在该表中索引相应的处理函数。
(4)用宏实现用户空间系统调用接口_syscall,最大支持 3 个参数的系统调用,故只需要完成_syscall[0-3](其中寄存器传递参数,eax 为子功能号,ebx保存第 1 个参数,ecx 保存第 2 个参数,edx 保存第 3 个参数)
C2.1 增加0x80中断描述符
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/interrupt.c |
C2.2 实现系统调用接口
在lib/user下创建文件syscall.c,来实现系统调用接口,核心是利用内联汇编传参并处罚中断,优点就是简单容易实现:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.c |
C2.3 增加 0x80 号中断处理例程
在kernel.S中添加syscall_ handler函数:
1 | ; /home/mouse/OS_mouse/tool/bochs/mouse/kernel/kernel.S |
然后修改thread.c/h,在结构体添加pid变量/锁,并且增加初始化和获取
1 |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/thread/thread.h |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/thread/thread.c |
C2.4 初始化系统调用和实现 sys_getpid
下面在/mouse/userprog下添加syscall-init.c/h
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/syscall-init.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/syscall-init.h |
C2.5 添加系统调用 getpid
现在来完善前面写的syscall.c,同时添加syscall.h,来实现我们的第一个系统调用
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.hs |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.c |
C2.6 在用户进程中的系统调用
注意将之前的初始化添加到init.c文件中,同时更新相关子Makefile文件,这里选择在主函数中模拟验证系统调用结果,分别用户内核函数中调用获取pid的函数,然后通过内核线程输出:
1 |
|
到这里,如果屏幕上打印出四个任务(除了主函数)的pid的话,那么就成功啦!
C.3 让用户进程说话
函数占用的也是静态内存,因此也得提前告诉编译器自己占用的内存大小。为了在编译时获取函数调用时所需要的内存空间(这通常是在栈中分配内存单元),编译器要求提供函数声明,声明中描述了函数参数的个数及类型,编译器用它们来计算参数所占据的栈空间。因此编译器不关心函数声明中参数的名称,它只关心参数个数及类型(您懂的,函数声明中的参数可以不包括参数名,但必须包括类型),编译器用这两个信息才能确定为函数在栈中分配的内存大小。重点来了,函数并不是在堆中分配内存,因此它需要提前确定内存空间,这通常取决于参数的个数及类型大小,但编译器却允许函数的参数个数不固定(可变参数),怎么看上去显得那么“动态”?其实可变参数的这种“动态”只是一种幻想,本质上还是静态,这一切得益于编译器采用 C 调用约定来处理函数的传参方式。C调用约定规定:由调用者把参数以从右向左的顺序压入栈中,并且由调用者清理堆栈中的参数。我们拿格式化输出函数 printf(char* format, arg1, arg2,…)举例,其中的参数 format 就是大伙儿再熟悉不过的包含“%类型字符”的字符串
既然参数是由调用者压入的,调用者当然知道栈中压入了几个参数,参数占用了多少空间,因此无论函数的参数个数是否固定,采用 C 调用约定,调用者都能完好地回收栈空间,不必担心栈溢出等问题
如何知道栈中有多少个参数呢,如何找到它们呢?其实答案全在格式化字符串中,此字符串通常称为 format,在格式化字符串中的字符’%’便是在栈中寻找可变参数的依据,紧跟’%’后面的是类型字符,类型字符表示数据类型和进制相关的内容。格式化字符串中有多少’%’,就在栈中找多少次参数,尽管用户(程序员)输入’%’的数量可以和参数个数不一致,但那是用户自己的事,除非用户愿意搬起石头砸自己的脚,编译器也不会检查它们的数量是否匹配,因为参数处理与否是函数自己的行为,由函数体内的代码决定。总之正常情况下,用户传入可变参数的数量应与 format 中字符’%’的数量匹配,以 format 中的’%’作为参数的线索,每找到一个’%’,就到栈中去找一次参数
下面直接通过代码来了解什么是可变参数:
C3.1 实现系统调用write
printf 函数来完成的,它是标准 io 函数,printf 函数是“格式化”“输出”函数,但它只是个外壳,真正起到“格式化”作用的是vsprintf函数,真正起“输出”作用的是write系统调用
下面我们来实现一个简易版的write,因为标准实现还需要fd(文件描述符),这个要等到后面学习文件系统的时候才能实现
首先,现在syscall.h中添加新的子功能号:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.hs |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.c |
同时在syscall_table中注册
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/syscall-init.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/syscall-init.h |
实现方法很简单,就是使用console_put_str输出str,然后通过strlen(str)返回长度
这里就不测试了,下面来实现printf;
C3.2 实现printf
int printf(const char *format, ...) 是我们 C 语言标准输出函数,前面说过,printf 是 vsprintf 和 write 的封装,下面我们还需要实现 vprintf 和对可变参数解析的3个宏以及转换函数itoa,本节的目标是使 printf 支持十六进制输出,即完成“%x”的功能
这里简单说一下我的理解:
printf或者可变字符的原理就是,编译器会通过将参数从右向左压入栈,然后我读取第一个参数format,然后取地址再强转成char*,就得到了栈的地址,然后偏移4个单位(32位的char*是这样的,如果想要更严谨,可以选择使用一个内存对齐的宏),得到第一个参数的位置,然后通过读取字符串中的%字符,判断%后面的内容(应该读取什么类型),来按顺序/变量大小读取刚刚获得的栈,然后再拼接到一个字符串中,就实现了”可变参数”,而参数的具体还得取决栈/缓冲区的大小,并不是真的无限可变
下面创建文件/lib/stdio.c/h,具体内容大家可以阅读注释
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/stdio.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/stdio.h |
最后我们在主函数中测试:
1 |
|
注意别忘了在Makefile中添加新增的文件,然后make mouse,运行之后就可以看到屏幕上正常显示便是成功啦,但注意我们现在还不支持浮点数
C.4 完善堆内存管理
完善堆内存管理也就是来实现malloc的接口以及底层实现
C4.1 malloc 底层原理
这里要引用一个新的名词:“arena”,这里还是引用书中部分句子
arena 是由“一大块内存”被划分成无数“小内存块”的内存仓库,我们在原有内存管理系统的基础上实现 arena,大伙儿知道,原有系统只能分配 4KB 粒度的内存页框,因此 arena 的这“一大块内存”也是通过 malloc_page 获得的以 4KB 为粒度的内存,根据请求的内存量的大小,arena 的大小也许是 1 个页框,也许是多个页框,随后再将它们平均拆分成多个小内存块。按内存块的大小,可以划分出多种不同规格的 arena,比如一种 arena 中全是 16 字节大小的内存块,故它只响应 16 字节以内的内存分配,另一种arena 中全是 32 字节的内存块,故它只响应 32 字节以内的内存分配。我们平时调用 malloc 申请内存时,操作系统返回的地址其实就是某个内存块的起始地址,操作系统会根据 malloc 申请的内存大小来选择不同规格的内存块。因此,为支持多种容量内存块的分配,我们要提前建立好多种不同容量内存块的 arena
arena 是个提供内存分配的数据结构,它分为两部分,一部分是元信息,用来描述自己内存池中空闲内存块数量,这其中包括内存块描述符指针(后面介绍),通过它可以间接获知本 arena 所包含内存块的规格大小,此部分占用的空间是固定的,约为 12 字节。另一部分就是内存池区域,这里面有无数的内存块,此部分占用 arena 大量的空间。我们把每个内存块命名为 mem_block,它们是内存分配粒度更细的资源,最终为用户分配的就是这其中的一个内存块。在咱们的实现中,针对小内存块的 arena 占用 1 页框内存,除了元信息外的剩下的内存被平均分成多个小内存块
尽管 arena 用小内存块来满足小内存量的分配,但实际上,arena 为内存分配提供了统一的入口,无论申请的内存量是多大,都可以用同一个 arena 来分配内存。小内存块的容量虽然有几种规格,但毕竟是为满足“小”内存量分配的,最大内存块容量不会超过 1024 字节,如果申请的内存量较大,超过 1024 字节,单独的一个小内存块无法满足需求时,这时候您可能想,将多个内存块组合到一起,肯定能满足需求,团结力量大嘛。方法虽具有可行性,但还是太麻烦了,动态维护内存块的信息会增加编程复杂性,这似乎有些像 Linux 的 buddy 系统啦。其实咱们的应用很简单,根本用不着那么麻烦,处理大内存请求时也会创建个 arena,但不会再将它拆分成小内存块,而是直接将整块大内存分配出去,确实有些简单粗暴,但很有效。故此类 arena 没有对应的内存块描述符,元信息中的内存块描述符指针为空
当申请的内存大于 1024 字节时,因此我们对大内存的定义就是大于1024 字节。为什么要以 1024 为界限呢?有这样一个提前,就是用于处理小内存块时,我们为 arena 分配 1 页框也就是 4KB 大小的内存,我们已经介绍过了,每个 arena 都分为两部分,一部分是占用空间很少的元信息,除元信息外的剩余部分才用于内存块的划分,因此,真正用于内存块的部分不足 4KB。内存块是平均划分的,所以最大的内存块肯定要小于 2KB,这里我们以 2 为底的指数方程来划分内存块,因此最大的内存块是1024 字节,也就是说对内存块规格为 1024 字节的 arena 来说,它只有 3 个内存块,每个都是 1024 字节,剩余的部分就浪费了。咱们这里的内存块以 16 字节为起始,向上依次是 32 字节、64 字节、128 字节、256字节、512 字节、1024 字节,总共 7 种规格,因此,内存块描述符也就这 7 种。再次强调一下,每种 arena中只有一种规格的内存块,并不是同时包含多种规格,比如要么该 arena 中全是 16 字节大小的内存块,要么全是 512 字节的内存块。对于小内存块来说,系统为 arena 分配的内存总共为 4KB,因此,不同规格arena 中的内存块数量也是不同的,举例来说,假设 arena 元信息大小为 12 字节,对于内存块规格 16 字节的 arena,其包括的内存块数量是(4096-12)/16,对于内存块规格 128 字节的 arena,其包括的内存块数量是(4096-12)/128
下面还是在代码中理解:
C4.2 底层初始化
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/memory.h |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/memory.c |
C4.3 实现sts_malloc
内存资源需要在需要的时候由系统动态创建,创建它的函数就是sys_malloc,下面要在thread.h中对pcb略微改动一下
为了实现用户进程的堆内存管理,在 pcb 中增加了内存块描述符数组 u_block_desc[DESC_CNT],同理,它也要初始化,所以要在process.c中的process_execute中进行初始化工作
1 | /*略................*/ |
1 | /*略................*/ |
然后是对内存管理方面的修改memory.c
1 | //返回arena中第idx个内存块的地址 |
然后我们在头文件添加对应的声明,最后就是对这个函数进行测试了
1 |
|
在两个内核线程中分别申请33,63字节的内存,按照我们写的逻辑,都会选择分配64字节的内存,因此 sys_malloc 会创建规格为 64 字节的 arena,然后把它拆分成 64 字节的内存块,由于是第 1 次申请内存且只申请了一种内存块,故系统中只存在这一个 arena,那么我们的结果如果相差16进制的4,也就是十进制的64字节,说明它给分配的就是64字节,符合预期
I am thread_b, sys_malloc(63), addr is OxC010204C
I am thread_a, sys_malloc(33), addr is OxC010200C
C4.4 内存的释放
内存管理系统不仅能分配内存,还应该能回收内存,这是最基本的内存管理机制
回忆一下:内存的使用情况都是通过位图来管理的,因此,无论内存的分配或释放,本质上都是在设置相关位图中的相应位,都是在读写位图。回收物理地址就是将物理内存池位图中的相应位清 0,无需将该 4KB 物理页框逐字节清 0。回收虚拟地址就是将虚拟内存池位图中的相应位清 0。分配则是相反的,也就是将位图中相应位置为 1 即可
在之前,我们申请的内存是通过malloc_page中,分别经历在虚拟地址池和物理地址池中分配地址(位图同理),在页表中完成虚拟地址和物理地址的映射
而释放内存刚好和这个相反,我们首先要在物理地址池释放物理页地址(位图同理),在页表中去掉虚拟地址的映射(将虚拟地址对应 pte 的 P 位置 0 page_table_ pte_remove),最后在虚拟地址池中释放虚拟地址(vaddr_remove)
下面我们将这几个步骤封装到函数mfree_page中
开始搓代码:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/memory.c |
C4.5 实现sys_free
1 | // 回收内存 ptr |
下面还是在主函数中进行测试,这里在主函数的两个内核线程中进程1000次的获取和释放内存:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/main.c |
我们通过查看内存池位图来验证,在k_thread_a位置打断点
1 | nm build/kernel/kernel.bin |grep -P 'k_thread_a' #获取k_thread_a地址 |
1 | lb 0xc000155f #打断点 |
我们可以在第一次进入断点查看一次位图,然后再过程中和结束后都查看一下位图,如果结束之后,位图的值一样,就算是获取释放成功啦
1 | <bochs:1> lb 0xc000155f |
这里的0x00000003,0x3 的二进制是 11,这表示用了 2 个页框,原因是创建两个线程时各用了 1 个页框做其 pcb,因此位图的使用情况与预期相符,等运行结束,也就是输出thread_a/b end的时候,应该和这个数字一样,并且中途如果暂停,位图的值应该会有不同的值
下面就来实现系统调用吧…….
C4.6 实现系统调用malloc && free
这里我们和书中一样,将这两个接口放到syscall.h文件中(Linux是放在stdlib.h中)
下面直接上代码,和之前的系统调用差不多
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.hs |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/lib/user/syscall.c |
然后是更新数组syscall_table
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/userprog/syscall-init.c |
下面来测试一下吧:
1 |
|
本次 main.c 中启了 4 个任务,分别是 2 个用户进程和 2 个内核线程。它们分别都申请了 256、255、254 字节大小的内存,因此它们对应的内存块规格都应该是 256 字节。所有内核线程共享内存空间,因此线程函数 k_thread_a 和 k_thread_b 所申请的内存应该会有地址累加的情况。用户进程拥有独立的内存空间,因此在申请内存时,都会从自己的堆空间从头算起,并不会产生地址累加的情况。256 的十六进制形式是0x100,比较方便查看地址累加的情况,这就是我们选择规格为 256 字节内存块的原因
下面是正确运行结果:
1 | prog_a mal1oc addr:0x804800C,Ox804810C,Ox804820C |
终于,内存分配到此结束~
D 编写硬盘驱动程序
之前我们写的东西一直都在第一课配环境创建的硬盘中,我们和书中一样,把那个作为启动盘,仅仅存放内核,现在我们再创建一个80M的硬盘来存储文件系统
D.1 硬盘及分区表
创建硬盘还是利用bochs的命令bximage,此命令在bochs安装目/bin/下
D1.1 创建从盘及获取安装的磁盘数
下面给出步骤(原书中图片–画横线的位置是要输入的内容–回车用中文表示)
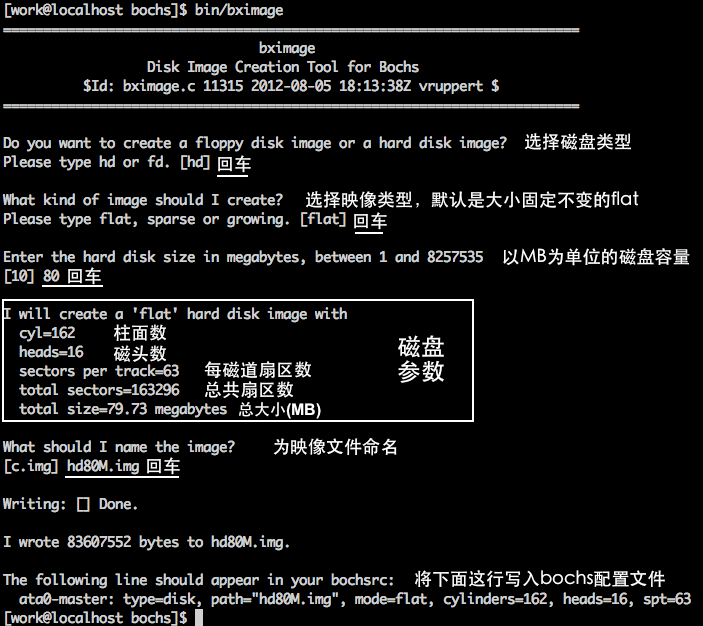
然后会得到一串内容ata0-master: type=disk, path="hd80M.img", mode=flat, cylinders=162, heads=16, spt=63,我们需要添加到配置文件中,同时要把ata0-master(主盘)修改为ata0-slave(从盘),其他的参数不变
修改后的文件如下:
1 | ############################################### |
在修改上面文件之前,我们可以通过指令来验证是否添加成功,因为硬盘是通过BIOS来识别的
添加之前,通过指令xp/b 0x475来读取磁盘的数量,再修改文件之前,输出的结果应该是0x01,添加之后如果数字变成离开0x02,就说明添加成功啦
ps:这是通过BIOS来识别写入的,所以要先c,运行BIOS程序之后,才能通过指令读取,否则读出来肯定全都是0x00
D1.2 创建磁盘分区表及简介
文件系统是运行在操作系统中的软件模块,是操作系统提供的一套管理磁盘文件读写的方法和数据组织、存储形式,因此,文件系统=数据结构+算法,哈哈,所以它是程序。它的管理对象是文件,管辖范围是分区,因此它建立在分区的基础上,每个分区都可以有不同的文件系统
本节的任务是将刚刚创建的磁盘进行分区,使用fdisk工具
(1)硬盘容量=单片容量×磁头数。
(2)单片容量=每磁道扇区数×磁道数×512 字节。
磁道数又等于柱面数,因此将公式 2 代入公式 1 后:
硬盘容量=每磁道扇区数×柱面数×512 字节×磁头数
ata0-slave: type=disk, path=”hd80M.img”, mode=flat, cylinders=162(柱面数), heads=16(磁头), spt=63(每磁道扇区数)
书中这里介绍了磁盘的具体组成和分区的详细内容,这里就只简略写几句
分区是逻辑上划分磁盘空间的方式,归根结底是人为地将硬盘上的柱面扇区划分成不同的分组,每个分组都是单独的分区。各分区都有“描述符”来描述分区本身所在硬盘上的起止界限等信息,在硬盘的MBR 中有个 64 字节“固定大小”的数据结构,这就是著名的分区表,分区表中的每个表项就是一个分区的“描述符”,表项大小是 16 字节,因此 64 字节的分区表总共可容纳 4 个表项,这就是为什么硬盘仅支持 4 个分区的原因(当初硬盘制造者认为,一台机器上顶多安装 4 个操作系统,每个操作系统各占 1 个分区,所以硬盘支持 4 个分区足矣)……….
下面来实操一下分区:
因为fdisk的版本有所不同,所以这里需要指定兼容模式,并且打开柱面设置才可以与书中展示的一致,整体命令如下:
1 | fdisk -c="dos" -u="cylinders" ./hd80M.img #以兼容模式进入 |
磁盘分区表(Disk Partition Table)简称 DPT,是由多个分区元信息汇成的表,表中每一个表项都对应一个分区,主要记录各分区的起始扇区地址,大小界限等
分区表是由分区工具如 fdisk 创建的,但却是给操作系统使用的。听我这么一说,大伙儿不要误以为操作系统很“弱”,其实操作系统也可以创建分区表,它有底层硬件的一切操作权限,无所不能,只是在通常情况下操作系统直接安装在某个分区上,所以分区表要在内核安装之前建立好,因此分区工具通常独立于操作系统。有了分区表,操作系统(的文件系统)可以根据各表项中的信息对硬盘进行分区管理,只要按照表项中的信息访问磁盘,就不会出现分区越界的情况。分区表既然称为“表”,这表示各个表项的数据结构一致,因此磁盘分区表就是个数组,此数组长度固定为 4,数组元素是分区元信息的结构
最初的磁盘分区表位于 MBR 引导扇区中,下面是它的结构:
(1)主引导记录 MBR –(偏移 0~0x1BD 的空间,共计 446 字节大小)
(2)磁盘分区表 DPT –(偏移 0x1BE~0x1FD 的空间,共64个字节)
(3)结束魔数 55AA,表示此扇区为主引导扇区,里面包含控制程序
- 拓展分区
来解决原来所支持的分区数太少的问题。大伙儿知道,“分区表的长度固定”才是问题的症结所在。按理来说,扩展分区中包含多少个逻辑分区,扩展分区的分区表中就该有多少表项,可是任何时候新事物的发展都要把“向上兼容”当成头等大事,它既要兼容此固定长度为 4 个分区的分区表,又要突破固定分区数的限制,这似乎有点为难,该怎样设计扩展分区的分区表呢?一个两全其美的方案是视这个扩展分区为总扩展分区,将它划分成多个子扩展分区,每个子扩展分区“在逻辑上”相当于硬盘,因此每个子扩展分区都可以有 1 个分区表。这样一来,各个分区表的长度依然固定为 4,但是允许有无限多个分区表,分区表项多了,自然支持的分区数就多了。如何将这些分区表组织到一起呢?扩展分区表采用链式结构,将所有子扩展分区的分区表串在一起,形成可容纳无限个分区表的单向链表。链表是要有结点的,这里的每个分区表就是结点,一般的链表结点除了包括数据外,还必须要包括下一个结点的地址,分区表也采用了这种结构,其表项就分为两部分,一部分是描述逻辑分区的信息,另一部分是描述下一个子扩展分区的地址
- 逻辑分区
要想使用分区,就离不开分区表,逻辑分区也是分区,为了使用它,也需要有元信息来描述它的范围、边界、类型等信息,因此在子扩展分区中也要有分区表来描述这些逻辑分区。分区表本身也要在子扩展分区中占磁盘空间,因此实际情况是每个子扩展分区的空间并不是只有逻辑分区,在个子扩展分区中最开始的扇区(剧透一下,此扇区称为 EBR 引导扇区,马上要介绍它)用于存储此子扩展分区中的分区表,此扇区中的内容也是前 446 字节是引导程序,中间 64 字节是分区表,后 2 字节是 0x55 和 0xAA,您看,它同 MBR 引导扇区的结构相同。紧随其后的是空闲的一部分扇区,其余剩下的大部分扇区才被用作存储数据的分区,即逻辑分区。因此,子扩展分区包含逻辑分区
扩展分区被划分出多个子扩展分区,每个子扩展分区都有自己的分区表,所以子扩展分区在逻辑上相当于单独的硬盘,各分区表在各个子扩展分区最开始的扇区中,该扇区同MBR 引导扇区结构相同,由于是经扩展分区划分出来的,所以它们称为 EBR,即扩展引导记录
EBR 中分区表的第一分区表项用来描述所包含的逻辑分区的元信息,第二分区表项用来描述下一个子扩展分区的地址,第三、四表项未用到。位于 EBR 中的分区表相当于链表中的结点,第一个分区表项存的是分区数据,第二个分区表项存的是后继分区的指针
值得一提的是这两个分区表项都是指向一个分区的起始,起始地址都是个扇区地址,只不过第一个分区表项指向的是该逻辑分区最开始的扇区,此扇区称为操作系统引导扇区,即 OBR 引导扇区。第二个分区表项指向下一个子扩展分区的 EBR 引导扇区
子扩展分区是在总扩展分区中创建的,子扩展分区的偏移扇区理应以总扩展分区的绝对扇区 LBA 地址为基准,因此,“子扩展分区的绝对扇区 LBA 地址=总扩展分区绝对扇区 LBA 地址+子扩展分区的偏移扇区”。
逻辑分区是在子扩展分区中创建的,逻辑分区的偏移扇区理应以子扩展分区的绝对扇区 LBA 地址为基准,因此,“逻辑分区的绝对扇区 LBA 地址=子扩展分区绝对扇区 LBA 地址+逻辑分区偏移扇区”。这里的子扩展分区就是当前子扩展分区
书中有配图,可以更好的理解,这里就不多说了,理论部分到此为止,写写代码吧:
D.2 硬盘初始化
首先是打开硬盘的中断信号(8259A从片的IRQ14上),主盘和从盘共享同一个中断接口,通过设置硬盘控制器的 device 寄存器中第 4 位的 dev 位指定是哪个触发
第 2 个 ata 通道接在 8259A 从片的 IRQ15 上,该 ata 通道上可支持两个硬盘。来自 8259A从片的中断是由 8259A 主片帮忙向处理器传达的,8259A 从片是级联在 8259A 主片的 IRQ2 接口的,因此为了让处理器也响应来自 8259A 从片的中断,屏蔽中断寄存器必须也把 IRQ2 打开
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/interrupt.c |
然后为了更方便实现调试输出,所以这里实现内核使用的printf,也就是printk,我们将它定义在lib/kernel/stdio-kernel.c中,同时,这里将va_end等宏移动到stdio.h文件中,方便这个文件调用,否则编译会有问题
1 | // ;/home/mouse/OS_mouse/tool/bochs/mouse/lib/kernel/stdio-kernel.h |
1 | // ;/home/mouse/OS_mouse/tool/bochs/mouse/lib/kernel/stdio-kernel.c |
下面介绍和硬盘相关的数据结构了,它定义在device/ide.h中
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/ide.h |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/ide.c |
基础部分的数据结构到这里就初始化完了
D.3 实现 thread_yield 和 idle 线程
这里还要实现一些其他的基础部件,比如thread_yield
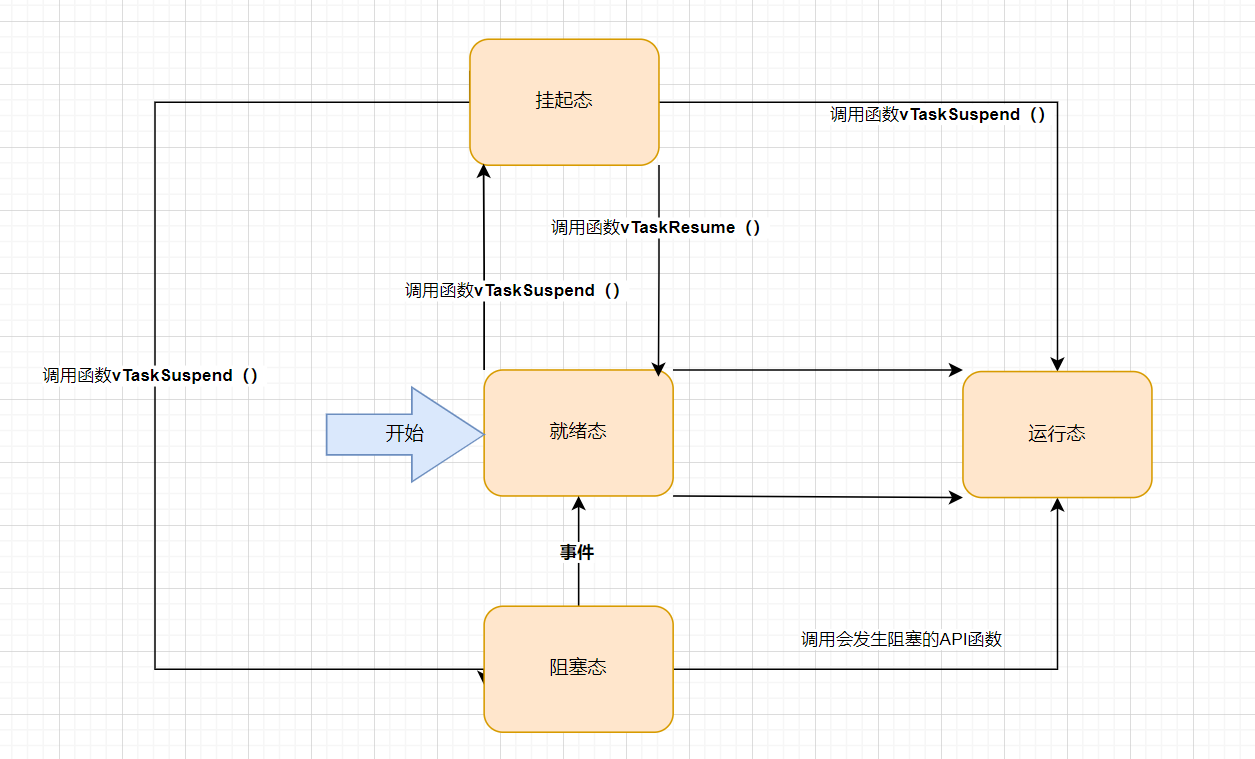
thread_yield 定义在 thread.c 中,它的功能是主动把 CPU 使用权让出来,它与 thread_block 的区别是thread_yield 执行后任务的状态是 TASK_READY,即让出 CPU 后,它会被加入到就绪队列中,下次还能继续被调度器调度执行,而 thread_block 执行后任务的状态是 TASK_BLOCKED,需要被唤醒后才能加入到就绪队列,
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/thread/thread.c |
添加的idle线程中有个指令hlt,这个指令的功能让处理器停止执行指令,也就是将处理器挂起(并不是类似“jmp $”那样空兜 CPU,CPU 利用率 100%),使处理器得到休息,CPU 利用率一下子就掉下来了,在那一小段时间 CPU 利用率为 0。处理器已经停止运行,因此并不会再产生内部异常,唯一能唤醒处理器的就是外部中断,当外部发生后,处理器恢复执行后面的指令。处理器需要被唤醒,必须要保证在开中断的情况下执行 hlt,因此内联汇编代码中,先执行 sti,再执行 hlt。顺便说一下,idle_thread 在第一次创建时会被加入到就绪队列,因此会执行一次,然后阻塞
同时,这里用了一个宏,定义在global.h文件中,用来防止编译器警告的(未使用的变量)
1 |
D.4 实现简单的休眠
这里还是基础部件,实现简单的休眠
硬盘和 CPU 是相互独立的个体,它们各自并行执行,但由于硬盘是低速设备,其在处理请求时往往消耗很长的时间(不过手册上说最慢的情况也能在 31 秒之内完成),为避免浪费 CPU 资源,在等待硬盘操作的过程中最好把 CPU 主动让出来,让 CPU 去执行其他任务,为实现这种“明智”的行为,我们在 timer.c中定义休眠函数,当然这只是简易版,精度不是很高,能达到目的就可以了
这里的休眠实现就是通过不断的调用thread_yield,将自己添加到就绪列表中,直到达到休眠的时间再继续于运行后面的代码
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/timer.c |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/timer.h |
D.5 完善硬盘驱动程序 & 获取硬盘信息,扫描分区表
下面是驱动的完整部分,因为涉及大量书中的概念等,这里只给出代码和测试结果:
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/ide.h |
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/device/ide.c |
最后将ide_init函数添加到总初始化中,然后运行就可以看到扫描硬盘的结果,应该和之前创建的一致
1 | // /home/mouse/OS_mouse/tool/bochs/mouse/kernel/init.c |
运行结果如下:
1 | ide_init start |
到此结束,这里涉及大量的硬盘相关概念知识在书中,大家可以自己阅读
E 文件系统前的小结
ok呀,也是只剩下两章就要结束这本书了,学校不让我去实习我就只能窝在这里学操作系统了,太难受了……………..
参考文献
- [操作系统真象还原 (郑纲) (Z-Library)] — 大家可以自己在网上查找相关资源
留言
]]>有问题请指出,你可以选择以下方式:
- 在下方评论区留言
- 邮箱留言






 3. 里面写入以下代码
3. 里面写入以下代码