Mpu6050——学习笔记

A 引入
A.1 模块和单片机型号说明
模块:mpu6050
单片机:stm32f103c8t6
函数库:标准库
当然,这只是一个大学生的学习笔记
B 模块介绍
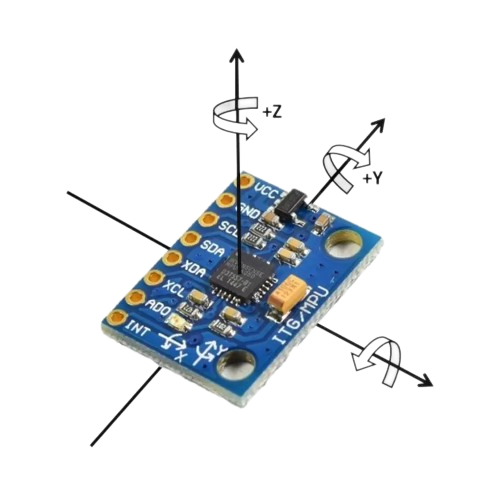
MPU6050是一个整合型的六轴运动处理模块,内部整合了3轴的陀螺仪和3轴的加速度计,还有一个温度传感器
常见的姿态传感器:
- 六轴(加速度计+陀螺仪),其中加速度计测量的三轴的加速度,陀螺仪测量的是三轴的角速度
- 九轴(加速度计+陀螺仪+磁力计) 磁力计用来解决六轴中偏航角的漂移,其中磁力计测量的时候三轴的磁场强度
- 十轴(加速度计+陀螺仪+磁力计+气压计)其中气压计用来测量高度
B.1 引脚定义
陀螺仪引脚定义
| 引脚编号 | 定义 | 说明 |
|---|---|---|
| 1 | VCC | 电源引脚,接3.3V或5V电源 |
| 2 | GND | 接地引脚 |
| 3 | SCL | I2C时钟线 |
| 4 | SDA | I2C数据线 |
| 5 | XDA | 辅助I2C数据线(通常未使用) |
| 6 | XCL | 辅助I2C时钟线(通常未使用) |
| 7 | INT | 中断引脚,用于输出中断信号 |
MPU6050 通常使用 I2C 通信,通过操作内部的寄存器来配置 MPU6050 的工作模式并进行数据的读写。其中,XDA 和 XCL 引脚可以外接磁力计,用于扩展为九轴传感器,从而解决六轴传感器在偏航角测量中存在的漂移问题。
这种扩展方式可以显著提高姿态解算的精度,特别是在需要精确航向角的应用场景中。
C 原理介绍
C.1 姿态角介绍
姿态角是描述物体在三维空间中姿态的一组角度参数,通常包括三个角度:偏航角(Yaw)、俯仰角(Pitch)和横滚角(Roll)。它们分别对应物体绕垂直轴、横轴和纵轴的旋转角度,又称欧拉角。
如下图,以飞机为水平面,飞机朝向为x轴,机翼朝向为y轴,垂直方向为z轴

偏航角(Yaw)
偏航角描述物体绕垂直轴(通常是Z轴)的旋转角度,反映物体的航向变化。偏航角在六轴传感器中容易受到漂移影响,通常需要通过外接磁力计来校正。俯仰角(Pitch)
俯仰角描述物体绕横轴(通常是Y轴)的旋转角度,反映物体的前后倾斜程度。加速度计和陀螺仪的结合可以较为准确地测量俯仰角。横滚角(Roll)
横滚角描述物体绕纵轴(通常是X轴)的旋转角度,反映物体的左右倾斜程度。与俯仰角类似,横滚角也可以通过加速度计和陀螺仪的融合来测量。
在 MPU6050 中,通过加速度计和陀螺仪的原始数据,结合姿态解算算法(如卡尔曼滤波或互补滤波),可以计算出物体的姿态角。这些角度广泛应用于无人机、机器人、运动追踪等领域,用于实现姿态控制和导航。
C.2 加速度计
加速度计实际上是一个弹簧测力计,根据牛顿第二定律 F=ma,想要测量加速度 a,只需要找一个单位质量的物体,测量它所受的力 F 就行了。
在 MPU6050 中,加速度计通过检测内部微机械结构(MEMS)的位移来测量加速度。当模块受到外力作用时,内部的质量块会发生微小的位移,这种位移会通过电容变化或压电效应转换为电信号,从而计算出加速度值。
MPU6050 的加速度计可以测量三个方向(X、Y、Z)的加速度,后面表示为:ax,ay,az
1 | //在静态情况下(基本只有重力加速度) |
当然,如果想增加稳定性可以使用下面的公式,对线性加速度稍鲁棒,误差较小
横滚角(Roll)
横滚角描述物体绕 X 轴的旋转角度:俯仰角(Pitch)
俯仰角描述物体绕 Y 轴的旋转角度:
加速度计具有静态稳定性,不具有动态稳定性
因为假设在向x轴正方向加速的时候,加速度计在z轴和x轴上都有读数,但是它无法判断这是因为倾斜带来的还是加速带来的,而且也会有振动噪声产生,使结果不稳定
C.3 陀螺仪
陀螺仪是一种利用角动量守恒原理来测量角速度的传感器。它可以检测物体绕三个轴(X、Y、Z)的旋转运动。在 MPU6050 中,陀螺仪通过微机械结构(MEMS)检测角速度,并输出对应的电信号。
需要注意的是,MPU6050 测量的是角速度(单位通常为 °/s),而不是角度。
如果需要得到角度值,可以通过对角速度进行积分来计算。
然而,由于积分过程中可能会累积误差(产生漂移),通常需要结合加速度计的数据,通过姿态解算算法(如卡尔曼滤波或互补滤波)来提高精度。
MPU6050 的加速度计可以测量三个方向(X、Y、Z)的角速度,后面表示为:gx,gy,gz
横滚角(Roll)
俯仰角(Pitch)
偏航角(Yaw)
:时间间隔,单位为秒,通常由 MPU6050 的采样频率决定。
陀螺仪具有动态稳定性,不具有静态稳定性
因为陀螺仪可以准确测量物体的角速度,特别是在动态运动中表现出色。
但是,如果传感器静止下来,则没有加速度,便无法通过积分获得当前的姿态,尤其如果环境中还存在噪声,角速度会因为噪声而无法完全归零,经过积分会产生偏移
所以当加速度计和陀螺仪一起使用的时候,通过互补滤波,卡尔曼滤波等,就可以得到相对稳定的姿态角
D 驱动代码
D.1 如何用I2C读取MPU6050原始值
MPU6050使用I2C协议通信,我们可以看它的寄存器手册知道如何配置采样率量程等参数,或者是读取角速度加速度等数据

举个栗子:
1 | //假设我们I2C已经配置好了 |
我们可以看到手册中的角速度值由0X3B和0X3C的高8位和低8位组成,所以假设我们要获得角速度的时候,要读取两次值,然后移位拼接得到真正的原始值,而16位二进制表示有符号的范围是-32768~32767,所以如果换算成+-250°/s 就可以直接除以131,同理,如果读取的加速度,假设要换算成+-2g,就可以直接除以16384

下面是手册中关于如何利用原始值换算成我们平常用的值



D.2 如何配置MPU6050
1 |
|
D.3 如何利用原始值解算姿态角
下面先介绍不使用DMP解算姿态角的方法,在前面我们已经可以通过加速度计和陀螺仪,得到ax,ay,az,gx,gy,gz,然后计算出2个roll,2个pitch和1个yaw,然后我们可以通过互补滤波来融合两组值来得到一个粗略的结果
互补滤波公式:
互补滤波是一种简单有效的姿态解算方法,通过结合加速度计和陀螺仪的数据,利用两者的优点来计算稳定的姿态角。其公式如下:
横滚角(Roll)
俯仰角(Pitch)
偏航角(Yaw)
参数说明:
、 、 :上一时刻的姿态角。 、 、 :陀螺仪在 X、Y、Z 轴上的角速度,单位通常为 °/s。 :时间间隔,单位为秒,通常由 MPU6050 的采样频率决定。 :滤波系数,范围为 ,用于平衡加速度计和陀螺仪的权重。通常 取值接近 0.98。
注释事项:
- 偏航角(Yaw)的计算通常需要磁力计来校正,因为加速度计无法提供水平状态下的偏航角信息。
- 滤波系数
的选择需要根据实际应用场景调整,较大的 值会更依赖陀螺仪,较小的 值会更依赖加速度计。
滤波系数 α 的取值:
滤波系数
其中:
:陀螺仪的时间常数,单位为秒,粗略直接取0.1 :采样时间间隔,单位为秒。
对面上面这个粗略的计算方法,可以直接在stm32中计算实现,但是结果会有很大的误差和抖动,所以官方给我提供了一个方法:
DMP是mpu6050中传感器内部集成的硬件模块(Digital Motion Processor,数字运动处理器),它具有运算能力,通过获得原始数据,可能使用卡尔曼滤波和四元数解算姿态角,可以让我们获得更精准的结果,并且节省主控的资源
D.4 如何使用DMP库读取解算后的姿态角
D.4.1 移植DMP库
ps:咳咳,我自己没移植成功,还是先借用别人移植好的吧
下面提供下载官方移植源码的方式:
- 打开官网:https://invensense.tdk.com/
- 找到相关固件界面

- 滑到最下面找到eMD5.1.3或eMD6.12
- 点击之后会让你登录,选择注册,注意会发送给你的邮箱check邮件,找不到的可以在垃圾邮箱里面翻一下
- 然后重新上面的流程就可以下载了,如果下载速度过慢可以试试魔法
- 下载完之后在文件中选中下面这几个文件,就可以开始移植了
- 参考可以看MSP430的驱动,就是下图文件




D.4.1 使用DMP库
跳过最难的配置dmp环节,下面是或得姿态角的关键代码
1 |
|
这个函数通过
dmp_read_fifo函数从 FIFO 中读取陀螺仪、加速度计和四元数数据,然后根据公式计算出姿态角,然后调用这个函数在我们需用使用的模块即可
总体的流程就是:
graph TD;
A[配置DMP] --> B[DMP读取原始值]
B --> C[DMP进行融合计算]
C --> D[DMP输出四元数]
D --> E[主控读取四元数]
E --> F[主控计算出姿态角]
F --> G[使用计算的姿态角]
E 如何外接磁力计
ps:还在学习ing
参考文献
文件地址
完成后上传
留言
有问题请指出,你可以选择以下方式:
- 在下方评论区留言
- 邮箱留言
- Title: Mpu6050——学习笔记
- Author: H_Haozi
- Created at : 2025-03-14 21:25:30
- Updated at : 2025-04-03 21:26:52
- Link: https://redefine.ohevan.com/2025/03/14/embedded_mpu6050/
- License: This work is licensed under CC BY-NC-SA 4.0.